This project will georeference, annotate, permanently archive and make open a trove of digital cartographic material that traces the spatial history of Rome from antiquity to the present. For over a decade, our project team has been developing geographically-linked databases for the study of Rome using material derived substantially from two cartographic monuments authored by Giambattista Nolli (1748) and Rodolfo Lanciani’s (1901). Among an abundance of maps of Rome, Nolli and Lanciani’s maps are doubtless the most comprehensive and detailed ones of modern and ancient Rome respectively. Together they serve as compelling visual and conceptual precursors to contemporary geographic information systems (GIS) technology and the field of spatial history, capturing numerous layers of data on the form and history of the city in a single synoptic view.
Nolli’s Pianta Grande di Roma is a touchstone of orthogonal mapping and the quintessential figure-ground representation of urban space, which remained among the most accurate of city maps for over a century. And Lanciani’s Forma Urbis Romae is a pioneering, color-coded account of Rome’s physical development over nearly three millennia and an encyclopedic repository of such things as inscriptions found and excavations conducted across the city. Despite contemporary advances in cartographic software, web browsers, and database technology, neither paper map has been substantially improved as a tool for documenting and analyzing the topographic history of Rome.
Open Rome will achieve several major milestones in rectifying this rather surprising failure of the digital information age. First, we will be able to complete a multi-year effort to create vector-based tracings of every feature of Nolli’s and Lanciani’s maps, allowing for the complete delamination, separation, and recombination of the vast material contained within them (thousands of structures such as walls, churches, domes, streets, piazze, obelisks, aqueducts, etc.). Second, we will georeference the material on an object-by-object basis at 1-2m accuracy, significantly enhancing its compatibility with other spatial data and its usability with location services in current and future digital mapping systems. Third, we will digitally annotate the textual information on the maps and develop a metadata record for each object aided by additional research and associated with authority files to meet linked open data (LOD) standards. Finally, we plan to permanently catalog this spatial data in Stanford’s Digital Repository and make it open and discoverable to the public through the Stanford Libraries’ geospatial data platform and multi-institutional search tool Earthworks.
This project represents a departure from closed and bespoke web interface designs that were du jour in earlier eras of digital humanities, by focusing on durable digital assets and responsible stewardship, which vastly extend the use of this material as searchable feature and basemap services that the broader community of scholars of Rome (including archeologists, art historians, architects, urban historians, literary scholars, classicists, geographers, historians and scholars of religion) may plug into their own, lightweight web applications or use to conduct and publish original research.
Our team hails from diverse disciplines and is based at Stanford, Dartmouth and the University of Oregon. Recently, we have been supported by a 2012 ACLS Digital Innovation Fellowship and by Digital Resources Grants from the Samuel Kress Foundation in 2015 and, again, in 2017. The bulk of our published works are consultable at www.mappingrome.com, which collects the long-term projects that will be extended, or even made obsolete by this current effort.
Our model enhances the broader enterprise of the humanities and provides a durable roadmap for the future efforts and collaborations we are actively planning. Ultimately, we hope to serve as a robust spoke in the growing digital hub of ‘linked pasts’ in Pelagios and other communities that are leading the linked open data (LOD) effort. In contrast to other projects, ours greatly increases the granularity of linked historical data on Rome. While the tools to rapidly and legibly visualize evolving cities in detail are still in their infancy; we seek to tap into the rich history of representing the Eternal City in order to set standards that will drive these tools for Rome and other cities. Taken as a whole, the multi-layered approach, devised by our team opens up a new world of cartographic synergy, which promises to revolutionize the role of maps in the study of spatial history.
Rodolfo Lanciani
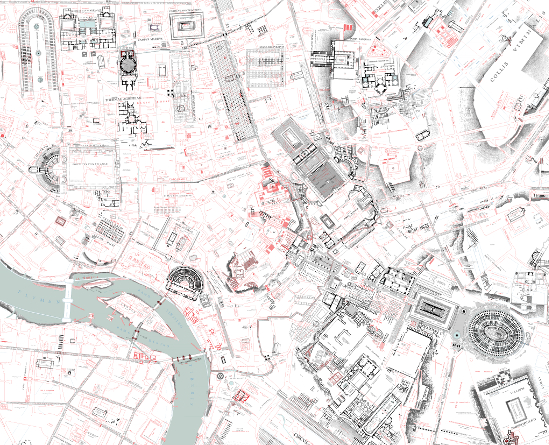
Forma Urbis Romae
Our team has devoted parts of the last five years digitizing the entire 46 plates of Lanciani's Forma Urbis Romae, creating a layered, vector version of the map while carefully maintaining the graphic integrity and symbology of the original. We are currently working to perfectly amalgamate the plates, polishing the stylistic incongruences and correcting minor errors.

G.B. Nolli
Pianta Grande di Roma
Nolli’s 1748 New Plan of Rome is regarded as both a pioneering work of scientifically accurate cartography and an influential aesthetic document, recognized for establishing the canonical figure-ground style of representing urban space. Our remastered version of the Nolli map derives from a high-definition scansion of the original plates assembled into a single image.
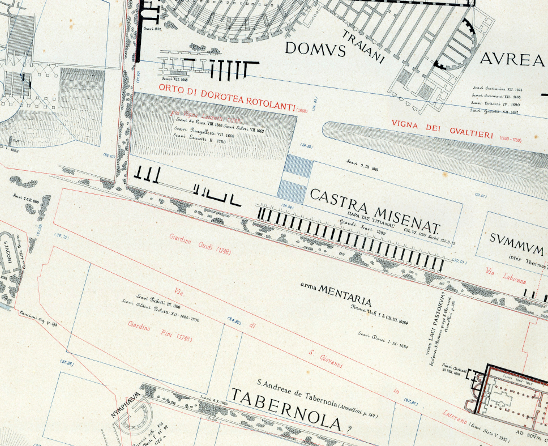
Forma Urbis Romae Detail
Textual annotations
The notes on Lanciani's Forma Urbis Romae are coded based on color, dimension and font. One of the aims of the project is to digitally annotate the textual information on the map and develop a metadata record for each object aided by additional research and where possible associated with authority files to meet linked open data (LOD) standards.


